MASCOT kurz vor dem Touchdown Am 3. Oktober 2018 soll MASCOT mit Messtechnik von der TU Braunschweig auf dem Asteroiden Ryugu landen
Die Abkopplung der beiden Landungsroboter (MINERVA-II1) von der Sonde Hayabusa2 ist am 21. September 2018 geglückt. Sie übertragen Daten und Fotos. Die Datenlage lässt darauf schließen, dass zumindest ein Rover sich auf der Oberfläche des Asteroiden Ryugu bewegen und diese erkunden kann. Damit ist es zum ersten Mal gelungen, dass ein Rover auf einem Asteroiden landet und autonom mobil ist. Der nächste große Schritt in der Hayabusa2-Mission von Japan, Frankreich und Deutschland wird die Landung von MASCOT sein – ein mobiler Lander, der unter anderem mit einem an der TU Braunschweig entwickelten Messinstrument ausgestattet ist. Geplant ist der Touchdown auf der Asteroidenoberfläche für den 3. Oktober 2018.
Aufgenommen während der Landung von MINERVA-Rover-1A am 21. September 2018. Links die Oberfläche des Asteroiden, der Lichtschein kommt von der Sonne. Bildnachweis: JAXA
MASCOT steht für „Mobile Asteroid Surface Scout“ und ist ein schuhkartongroßes Gerät mit Abmessungen von 30 mal 30 mal 20 Zentimetern und einer Gesamtmasse von rund zehn Kilogramm. Es beherbergt vier wissenschaftliche Instrumente, die die Oberfläche des Asteroiden Ryugu detailliert untersuchen sollen. Das besondere an dem Scout ist, dass er über einen Fortbewegungsmechanismus verfügt – ohne Ketten, Rollen oder Räder. Ein Schwungarm wird durch einen Motor beschleunigt und blitzschnell abgebremst. So wird ein Ruck ausgelöst, der den Scout springen lässt. Sensoren sorgen dafür, dass MASCOT weiß, wo oben und unten ist. So kann sich der Scout selbständig in die zur Durchführung der Experimente erforderliche Lage bringen. Eine Premiere wird sein, dass er mit diesem Fortbewegungsmechanismus Messungen an mehr als einem Ort machen kann.
Die Kapazität der MASCOT-Batterie soll für bis zu 16 Stunden Betriebszeit ausreichen – abhängig von der Temperatur (zwischen 47 und -63 Grad Celsius an der Landestelle) und dem aktuellen Stromverbrauch vor Ort. Im Idealfall kann MASCOT Messungen vornehmen, während Ryugu zwei vollständige Tag-und-Nacht-Zyklen durchläuft.
Vorbereitungen zur Landung
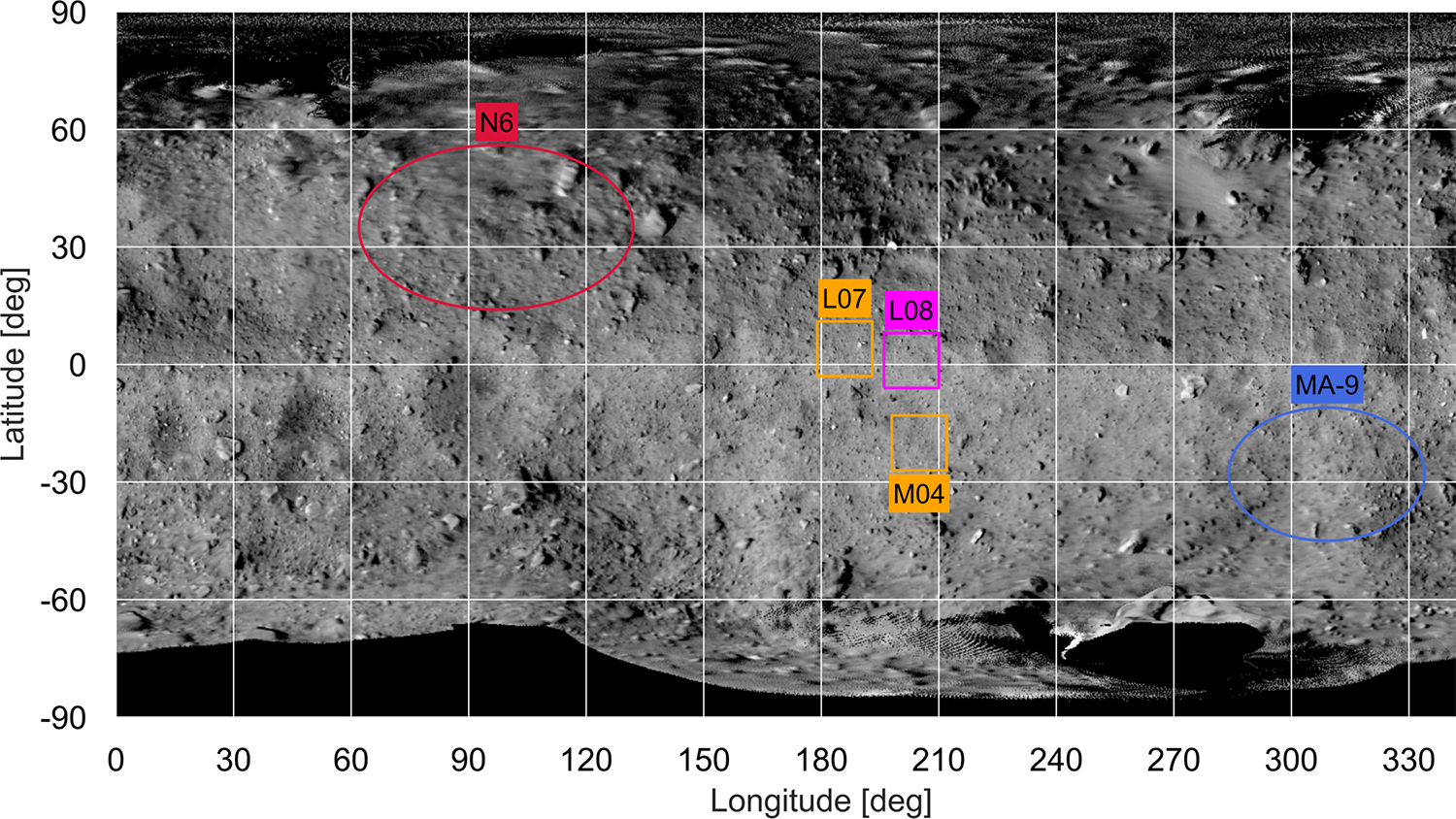
Landestellen der Hayabusa2-Mission auf dem Asteroiden Ryugu: Der Lander MASCOT soll in der blau markierten Landeelipse MA-9 auf Ryugu landen. Bildnachweis: JAXA, University of Tokyo & collaborators
Wo aber ist der perfekte Landeplatz auf dem Asteroiden mit einem Durchmesser von rund 950 Metern? Die Umgebung darf nicht zu heiß und nicht zu kalt sein, damit Batterie und Instrumente funktionieren können. Die Oberfläche sollte nicht zerklüftet, gut erreichbar und natürlich wissenschaftlich spannend sein. Um diese Rahmenbedingungen bestmöglich zu erfüllen, wurde zunächst die Oberfläche des Asteroiden umfassend fotografiert und kartografiert. Zusammen mit 100 Partnern wurde die Landestelle aus zehn Kandidaten ausgewählt.
Die geplante Landestelle MA-9 bietet den Vorteil, dass sich MASCOT und die Sonde bei der Entnahme von Bodenproben nicht in die Quere kommen. Während die Sonde am Äquator und die beiden MINERVA-Rover auf der nördlichen Hemisphäre Daten erfassen, erforscht MASCOT Orte auf der südlichen Hemisphäre. Aufnahmen der optischen Navigationskamera der Hayabusa2-Sonde zeigen, dass sich in dem Bereich rund um die Landestelle vermutlich jüngeres Material befindet, das nur wenig der kosmischen Strahlung und dem Partikelstrom des Sonnenwinds und interplanetaren Staubs ausgesetzt war – und somit noch ursprünglich und unverändert sein könnte.
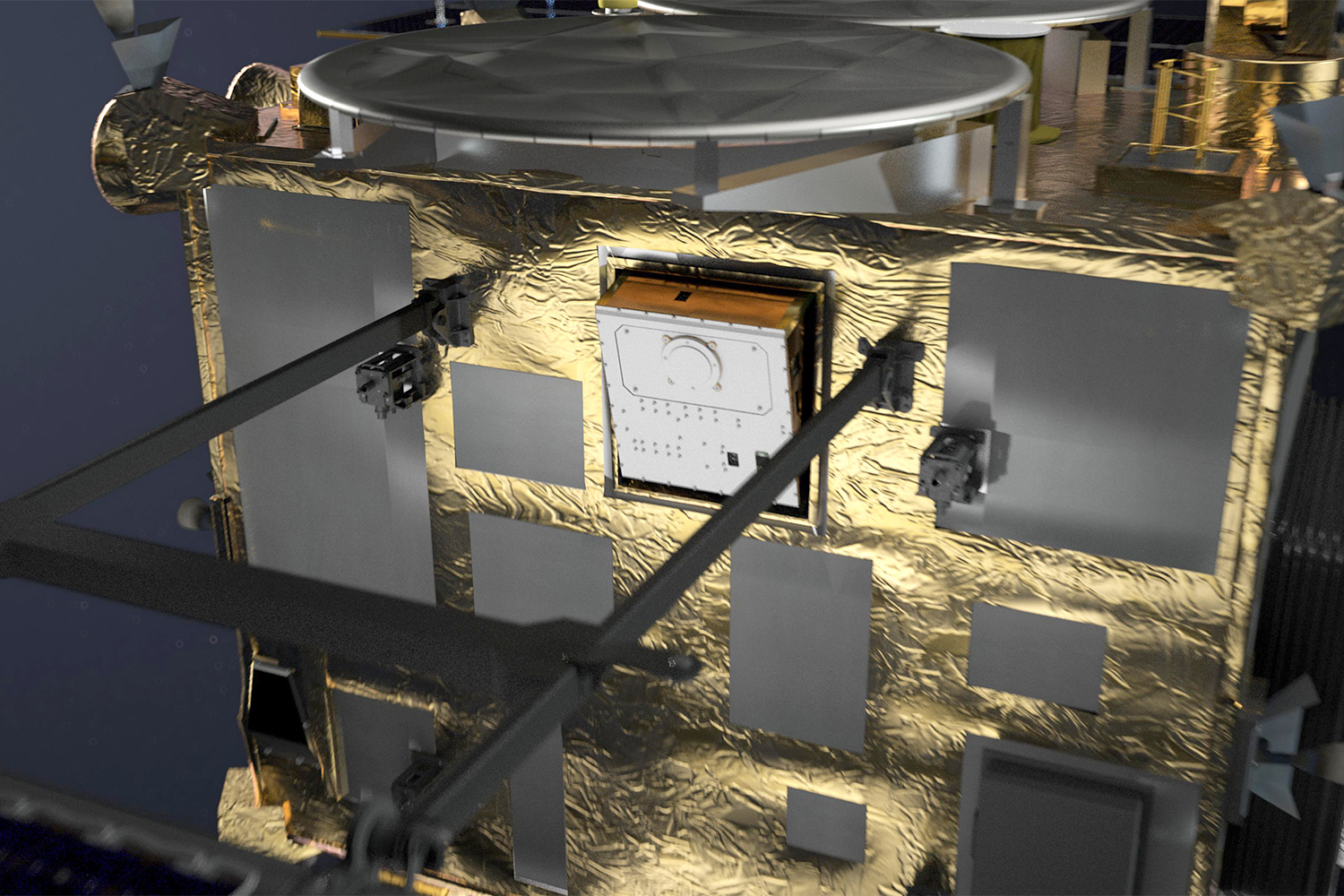
Der kleine graue Kasten – das ist der MASCOT-Lander an Bord der Sonde Hayabusa2. Bildnachweis: DLR
So ist der Touchdown von MASCOT geplant
Der MASCOT-Lander, den das DLR in Kooperation mit der französischen Raumfahrtagentur CNES und der japanischen Raumfahrtagentur JAXA entwickelt hat, reiste 320 Millionen Kilomter an Bord der Hayabusa2-Sonde. In der Abkopplungsphase wird der Scout mittels eines Federmechanismus aus seiner Halterung in der Sonde herausgeschoben. Aus circa 60 Metern Höhe wird er mit der Geschwindigkeit eines Papierblatts in Richtung des Asteroiden fallen und nach einer Viertelstunde einen ersten Bodenkontakt mit Ryugu haben.
Da die niedrige Anziehungskraft des Asteroiden – sie beträgt nur ein Sechzigtausendstel des Werts auf der Erde – einen oder mehrere Sprünge über die Oberfläche machen, bis er zum Stillstand kommt. Der finale Landeplatz ist deshalb nicht genau zu bestimmen. Für die Durchführung der Experimente bzw. Messungen ist aber eine „aufrechte“ Position erforderlich. Damit MASCOT arbeiten kann, werden dem Bordcomputer über Lagesensoren die Orientierungsdaten mitgeteilt. Daraufhin wird der Schwungarm aktiviert, der den Lander gegebenenfalls nochmals in Bewegung setzt, sodass MASCOT am Ende die richtige Position hat.
Die Messinstrumente an Bord von MASCOT
An Bord des Scout wird neben einer Kamera, einem Radiometer und einem Spektrometer auch ein Magnetometer mitgeführt. Der Magnetometer (MasMag) wurde an der TU Braunschweig entwickelt und wird die Magnetisierung des Gesteins untersuchen. Das Radiometer des DLR misst die Oberflächentemperatur, das Spektrometer der französischen Raumfahrtagentur CNES analysiert Minerale und Gesteine, aus denen der Asteroid besteht. Die Kamera des DLR nimmt die Feinstruktur der Oberfläche auf, um den Wissenschaftlerinnen und Wissenschaftlern Aussagen über die Beschaffenheit, die Größe und Formen der Partikel im Asteroidenboden zu ermöglichen und die Umgebung der Landestelle zu kartographieren.
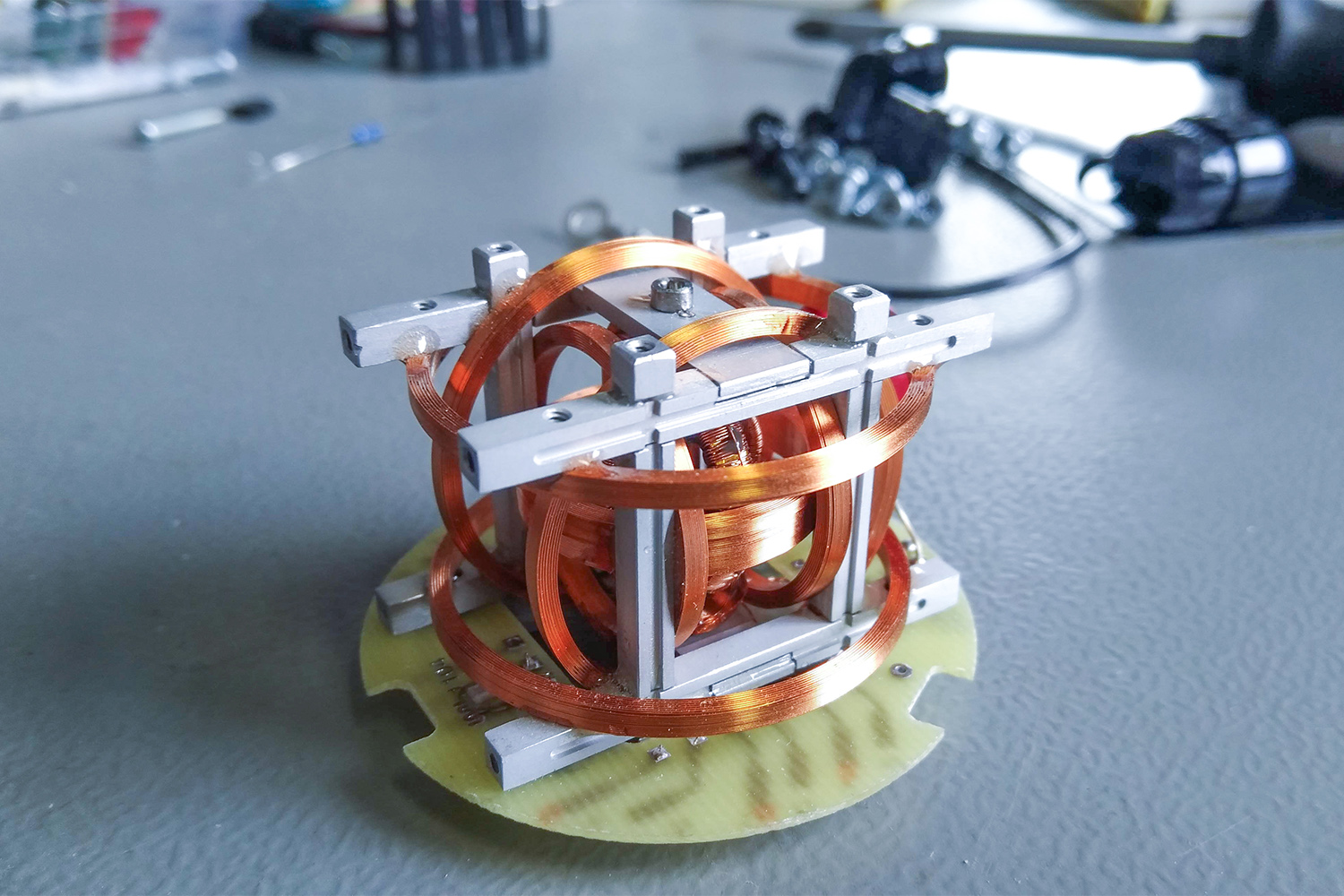
Beispiel für ein Magnetometer wie er auch im MASCOT-Lander zum Einsatz kommt, Bildnachweis: János Krüger/TU Braunschweig
Auf der Oberfläche des Asteroiden
Nach Abschluss der ersten Messrunde wird MASCOT autonom seinen Standort wechseln und erneut Messungen vornehmen. Geplant ist auch ein dritter Messdurchgang. Die von MASCOT gesammelten experimentellen Daten und Betriebsddaten werden zur Sonde Hayabusa2 übertragen, die sich in etwa drei Kilometern Entfernung vom Asteroiden in einer Beobachterpostion befindet. Von dort werden alle Daten zur Erde übertragen. Direkte Zugriffe auf MASCOT vom Kontrollzentrum Sagamihara in Japan aus ist nicht möglich, da die Entfernung und entsprechend die Signallaufzeiten zu lang sind.