Bild des Monats: Navigationssystem für mobile Roboter Aus dem Institut für mobile Maschinen und Nutzfahrzeuge
Auf dem Bild zu sehen ist ein Scan eines Bodenradars. Er zeigt unveränderliche Objekte im Boden. Verknüpft man die Daten mit der Position aus Lasermessungen, kann eine daraus entwickelte Karte zur Navigation von mobilen Robotern genutzt werden. Ein Laser oder Kameras wären dann nicht mehr nötig. Dazu forscht das Institut für mobile Maschinen und Nutzfahrzeuge im Projekt „LoBaBo“.
Ein fahrender Roboter mit Radareinheit erstellt Bodenscans bis zu einer Tiefe von 40 Zentimeter. Bildnachweis: IMN/TU Braunschweig
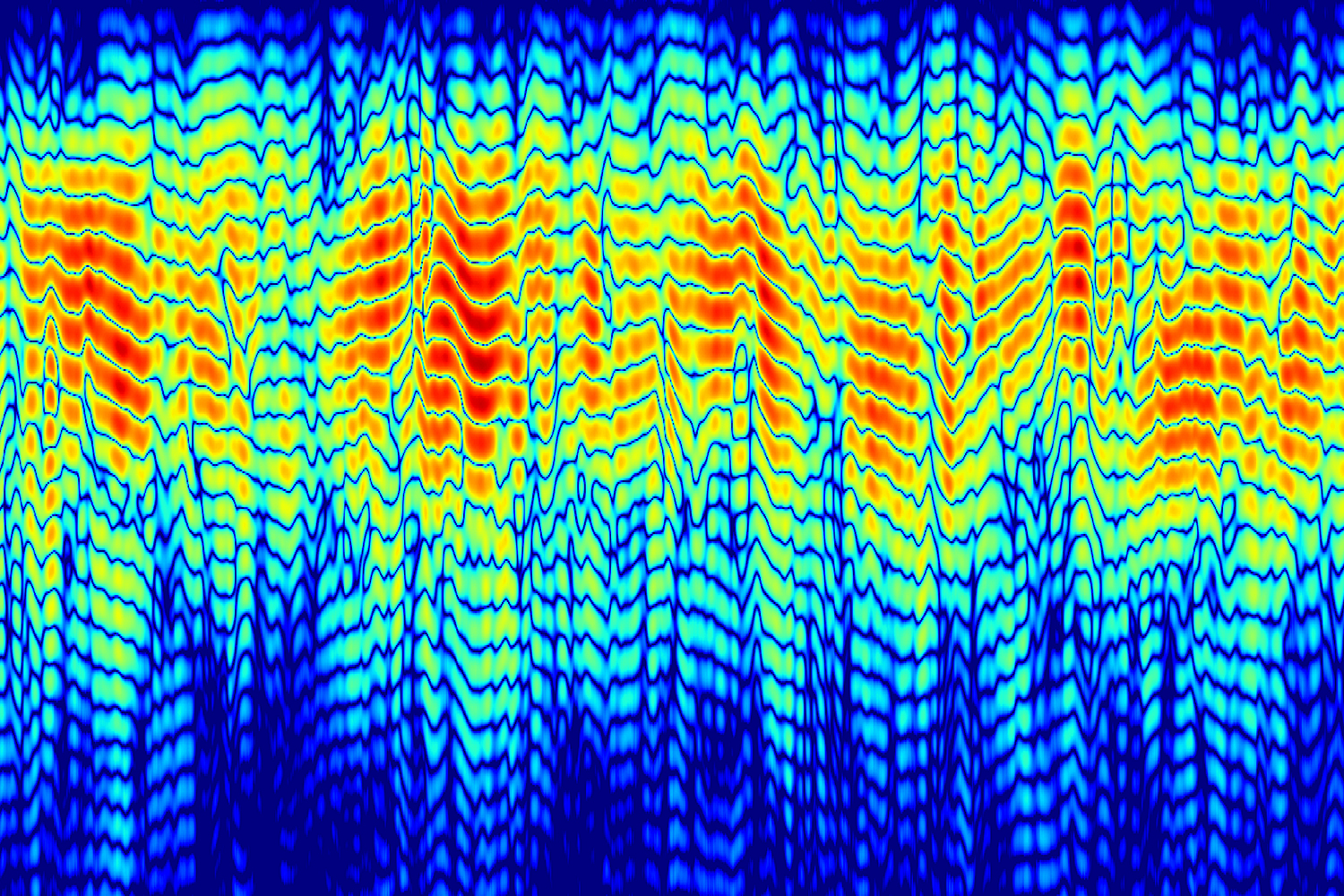
Auf dem Bild zu sehen ist ein sogenannter B-Scan eines Bodenradars (Stepped frequency radar), der sich aus mehreren Einzelnscans (A-Scans) zusammensetzt. Auf der horizontalen X-Achse ist der gefahrene Weg (15 Meter) dargestellt und die senkrechte Y-Achse zeigt die Eindringtiefe, die der Sensor in den Boden schaut. Das entspricht etwa einer Tiefe von 40 Zentimetern. Man kann gut die Reflektion von Steinen und der Armierung des Hallenbodens erkennen. Die Farbgebung gibt Auskunft darüber, wie stark die Reflektion ist: Je rötlicher der Punkt, desto stärker ist die Reflektion des Objekts im Boden. Ähnlichkeit hat diese Messung etwa mit der Ultraschalluntersuchung beim Arzt, sodass man Organe, Embryos beobachten kann.
Solche Radarbilder erzeugt der Prototyp eines mehrzeiligen Bodenradars, der auf einem autonom fahrenden Versuchsroboter befestigt wurde. Entwickelt wird diese Technologie im Forschungsprojekt „LoBaBo“. Im Rahmen des Projekts werden radarbasierte Sensoren und Verfahren zur ein- bzw. zweidimensionalen Erfassung der Struktur des Fahrbahnuntergrundes erforscht.
Laser und Radar
Ziel der Bodenvermessung ist es, eine Karte des Untergrundes aufzuzeichnen, die mit einem Lidar-Lokalisierungssystem (Laserscanner) referenziert wurde. Warum Laser und Radar? Mit der Messung des Bodenradars kennt man nur diesen kleinen, einige Zentimeter breiten Ausschnitt des Bodens. Um zu wissen, wo diese Messung war, kommt ein Lokalisierungssystem (Laser-Scanner) zum Einsatz, damit ein Radar-Scan eine Position erhält. Der Laserscanner bestimmt nur die Position im Raum, also weder den Boden noch die Umgebung. Die Positionsbestimmung erfolgt dann mittels Triangulation mit Hilfe von Reflektormarken.
Mit dieser Karte und dem Bodenradar wird der Roboter anschließend ohne das Lidar-Lokalisierungssystem lokalisiert. Die Merkmale im Boden sind stabil, zeitlich unveränderlich, sodass dies Vorteile gegenüber anderen Lokalisierungssensoren wie Kameras oder Lidars darstellt.
Störungen und Reflexe reduziert
Die Abbildung hier ist das Ergebnis einer Messung mit nur einer Radar-Antenne. Die Radarscans (Sweeps) sind hochpassgefiltert über den gefahrenen Weg, damit konstante Störungen und Reflexe zum Boden eliminiert werden, da man nur die Unterschiede im Boden betrachten möchte, damit man sich lokalisieren kann.
Zuverlässige Navigation ohne Laser und Kamera
Basierend auf den gewonnenen Daten soll über geeignete Mapping- und Matching-Verfahren eine eindeutige Ermittlung der Pose (Ort und Orientierung) durchgeführt werden. Dadurch können zukünftig mobile Roboter im Außenbereich ohne zusätzliche Installationen zuverlässig navigieren.
Diese Technologie ist bereits so weit fortgeschritten, dass sie das Interesse in der Automobilindustrie geweckt hat. So forschte das Massachusetts Institute of Technology (MIT) in einem Vorgängerprojekt dazu und etabliert das System mit einer Ausgründung im Markt. Die Forschenden an der TU Braunschweig planen, es auf fahrerlosen Transportsystemen einzusetzen, die mit circa 30 Kilometer pro Stunde deutlich langsamer fahren.