Picture of the Month: Navigation System for Mobile Robots From the Institute for Mobile Machines and Commercial Vehicles
The picture shows a scan of a ground-penetrating radar. It shows unchanging objects in the ground. If the data is combined with the position from laser measurements, a map developed from this information can be used for the navigation of mobile robots. A laser or cameras would then no longer be necessary. The Institute for Mobile Machines and Commercial Vehicles is conducting research on this in the “LoBaBo” project.
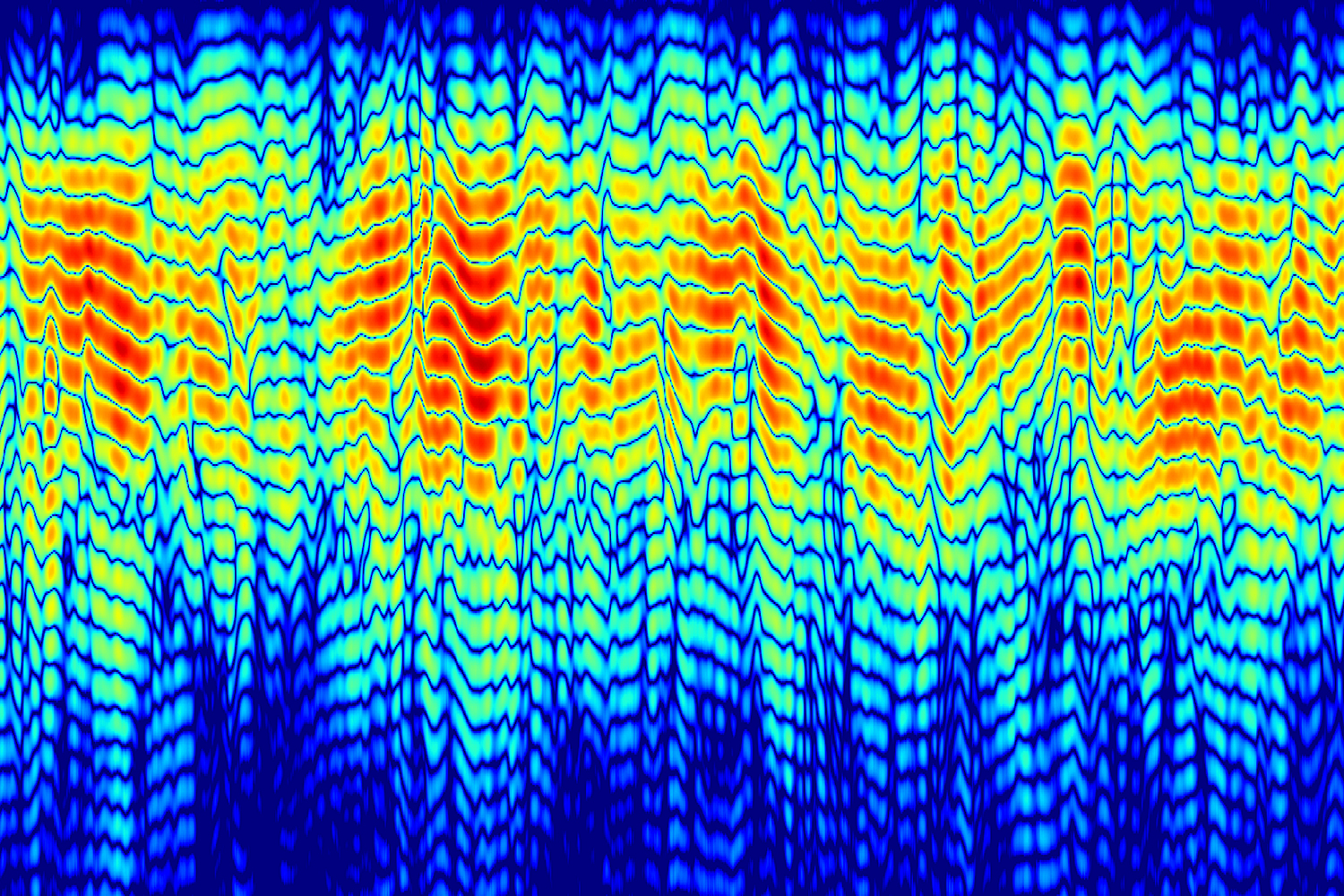
A moving robot with radar unit creates ground scans down to a depth of 40 centimetres. Picture credits: IMN/TU Braunschweig
The picture shows a so-called B-scan of a ground-penetrating radar (stepped frequency radar), which is composed of several individual scans (A-scans). The horizontal X-axis shows the distance travelled (15 metres) and the vertical Y-axis shows the penetration depth that the sensor looks into the ground. This corresponds to a depth of about 40 centimetres. You can easily see the reflection of stones and the reinforcement of the hall floor. The colouring provides information about how strong the reflection is: the redder the dot, the stronger the reflection of the object in the ground. This measurement is similar to an ultrasound examination by a doctor, so that organs and embryos can be observed.
Such radar images are generated by the prototype of a multi-line ground radar, which was mounted on an autonomously driving test robot. This technology is being developed in the research project “LoBaBo”. Within the framework of the project, radar-based sensors and methods for the one- or two-dimensional recording of the structure of the road surface are being researched.
Laser and Radar
The aim of the ground survey is to record a map of the subsoil that was referenced with a lidar localisation system (laser scanner). Why laser and radar? With the ground penetrating radar’s measurement, you only know this small section of the ground that is only a few centimetres wide. To know where this measurement was, a localisation system (laser scanner) is used to give a radar scan a position. The laser scanner only determines the position in space, i.e. neither the ground nor the surroundings. The position is then determined by triangulation using reflector marks.
With this map and the ground radar, the robot is then localised without the lidar localisation system. The features in the ground are stable, unchanging over time, so this shows advantages over other localisation sensors such as cameras or lidars.
Disruptions and reflections reduced
The image here is the result of a measurement with only one radar antenna. The radar scans (sweeps) are high-pass filtered over the travelled path to eliminate constant interference and reflections to the ground, as you only want to look at differences in the ground so you can locate yourself.
Reliable navigation without laser and camera
Based on the acquired data, an unambiguous determination of the pose (location and orientation) is to be carried out via suitable mapping and matching procedures. In the future, this will enable mobile robots to navigate reliably in outdoor areas without additional installations.
This technology is already so advanced that it has aroused interest in the automotive industry. The Massachusetts Institute of Technology (MIT), for example, conducted research on this in a previous project and is establishing the system on the market with a spin-off company. The researchers at TU Braunschweig are planning to use it on driverless transport systems that travel much slower at around 30 kilometres per hour.