Ein Seilroboter in der Schwebe Mit Sensorknoten Gegenstände in Innenräumen lokalisieren
Seit einigen Wochen hängt er an vier langen, roten Seilen im Atrium des Informatikzentrums und dreht dort seine Runden: Seilroboter James. Er gehört zum Projekt „InPhase“ des Instituts für Betriebssysteme und Rechnerverbund. Mit James´ Hilfe wird erforscht, wie Gegenstände oder Personen in Innenräumen mit Sensorknoten lokalisiert werden können.

Seilroboter James im Atrium des Informatikzentrums. Bildnachweis: Gideon Rothmann/TU Braunschweig
Manchmal muss man schnell wissen, wo sich etwas oder jemand befindet – zum Beispiel, wenn eine Person während der Arbeit in einem Gefahrraum in Not gerät oder wenn eine Palette mit Ware in einer Lagerhalle gesucht wird. Die Herausforderung bei der Lokalisierung in Innenräumen: GPS funktioniert hier nicht, das Tracken von Paletten mit Barcodes und Handscannern ist zu zeitaufwendig und die Ortung über W-LAN zu ungenau.
Hier setzt das Projekt „InPhase“ an: Mit Sensorknoten messen die Wissenschaftler Entfernungen und lokalisieren Punkte im Raum. „Die Sensorknoten sind mit einem Funk-Transceiver ausgestattet, der Funksignale senden und empfangen kann“, erklärt Yannic Schröder, wissenschaftlicher Mitarbeiter am Institut für Betriebssysteme und Rechnerverbund. „Die Funksignale werden als elektromagnetische Schwingungen in den Raum ausgestrahlt. Die Lage zweier Schwingungsverläufe zueinander wird als Phasenlage bezeichnet. Wir messen, mit welcher Phasenlage das Funksignal beim Empfänger ankommt. Dadurch können wir die Entfernung zwischen zwei Knoten messen und letztlich die Koordinaten eines Knotens bestimmen.“
-
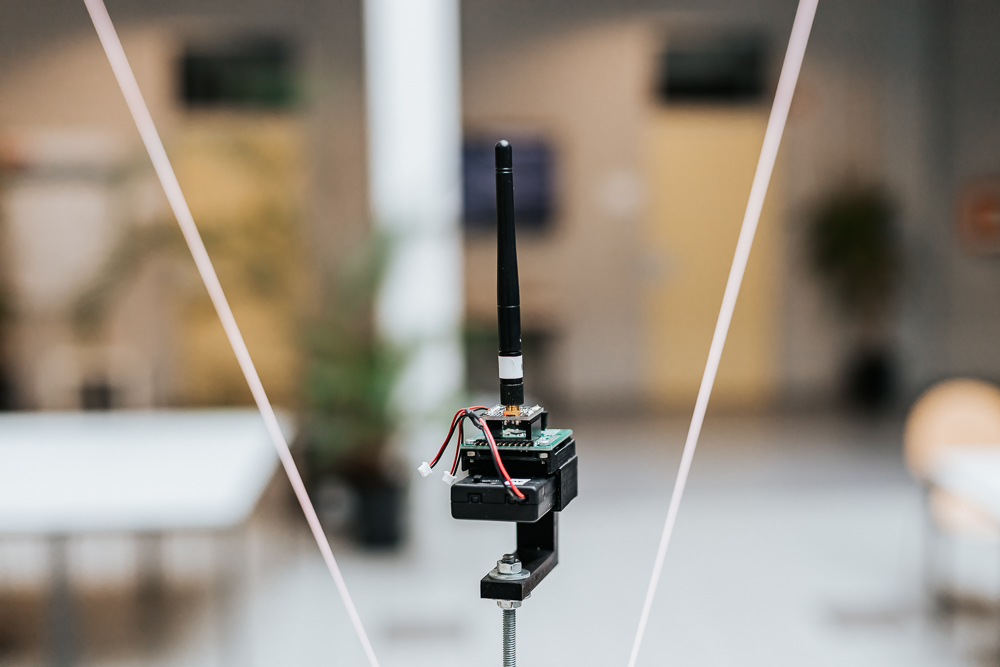
- Einer von insgesamt acht Sensorknoten, mit denen Gegenstände in Innenräumen lokalisiert werden können. Bildnachweis: Gideon Rothmann/TU Braunschweig
-

- Vom ersten bis zum dritten Stock kann der Seilroboter jeden beliebigen Punkt anfahren. Bildnachweis: Gideon Rothmann/TU Braunschweig
Ein virtuelles Koordinatensystem
Sieben Sensorknoten hängen im ersten Stock an den Wänden rund um das Atrium im Informatikzentrum. Beim Anbringen unterstützte Dirk Vogel vom Institut für Geodäsie und Photogrammetrie: Mit einem Tachymeter hat er den Raum vermessen und ein virtuelles Koordinatensystem aufgespannt, in dem jeder Knoten seinen festen Platz hat.
Je nachdem, wie weit die Sensorknoten voneinander entfernt sind, kommt das Funksignal des Senders mit einer anderen Phasenlage beim Empfänger an. „Wenn wir mehrere Signale haben und den Phasenunterschied dazwischen kennen, können wir mit diesen Daten bestimmen, wie weit der Empfänger vom Sender entfernt ist“, sagt Schröder. „Bewegt sich ein Sensorknoten im Raum, kann seine Position so mithilfe der übrigen, fest montierten Sensorknoten bestimmt werden.“

Haben gemeinsam den Seilroboter gebaut: Til Koke und Yannic Schröder (v.l.) vom Institut für Betriebssysteme und Rechnerverbund. Bildnachweis: Gideon Rothmann/TU Braunschweig
Jetzt kommt James ins Spiel
Optisch erinnert Seilroboter James auf den ersten Blick an ein Pendel mit einer Antenne. Er besteht aus vier Seilwinden, die im dritten Stock des Informatikzentrums angebracht sind. Die Seile laufen im ersten Stock an einer Plattform zusammen, auf der ein Sensorknoten befestigt ist. Eine Software berechnet, wie viel Seil welche Winde auf- oder abwickeln muss, damit der Roboter einen bestimmten Punkt anfahren kann. Beim Bau von James hat Til Koke mitgeholfen, der studentische Hilfskraft am Institut ist.
„Der Seilroboter ist ein Tool, mit dem wir das Sensorknoten-System automatisiert testen können. Wir fahren mit ihm Punkte an, deren Koordinaten wir exakt kennen und überprüfen so, ob die Lokalisation durch die Sensorknoten korrekt ist“, so Yannic Schröder. Bald geht es für James noch höher hinaus: Dann werden seine Seilwinden im 5. Stock unter der Decke angebracht.